This is my blog.
为什么要研究视觉?
计算机视觉:从图像或图像序列中获取对世界的描述
从运动求取结构技术:从图像序列中获取所见物体的描述以及摄像机的运动规律
医学图像处理与理解;检验人们对物体拍摄的图像,以便确定它们是否符合规定;卫星图像的理解;对收集的图片加以组织与结构化
第一章 摄像机
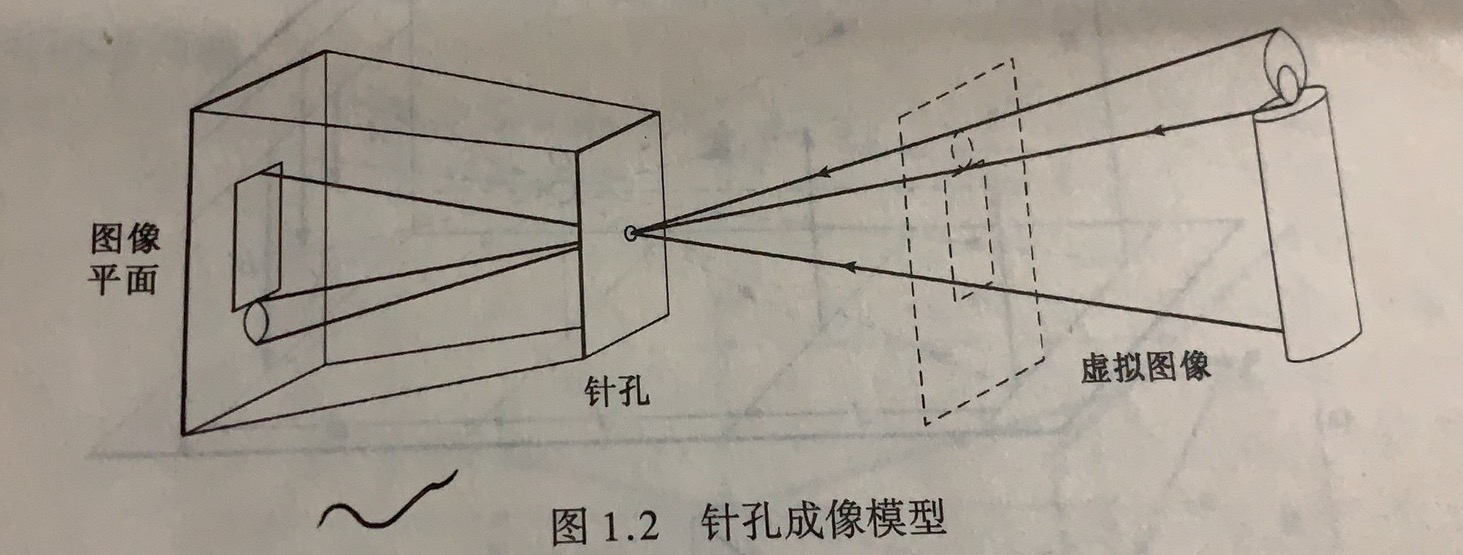
针孔摄像机
透视投影
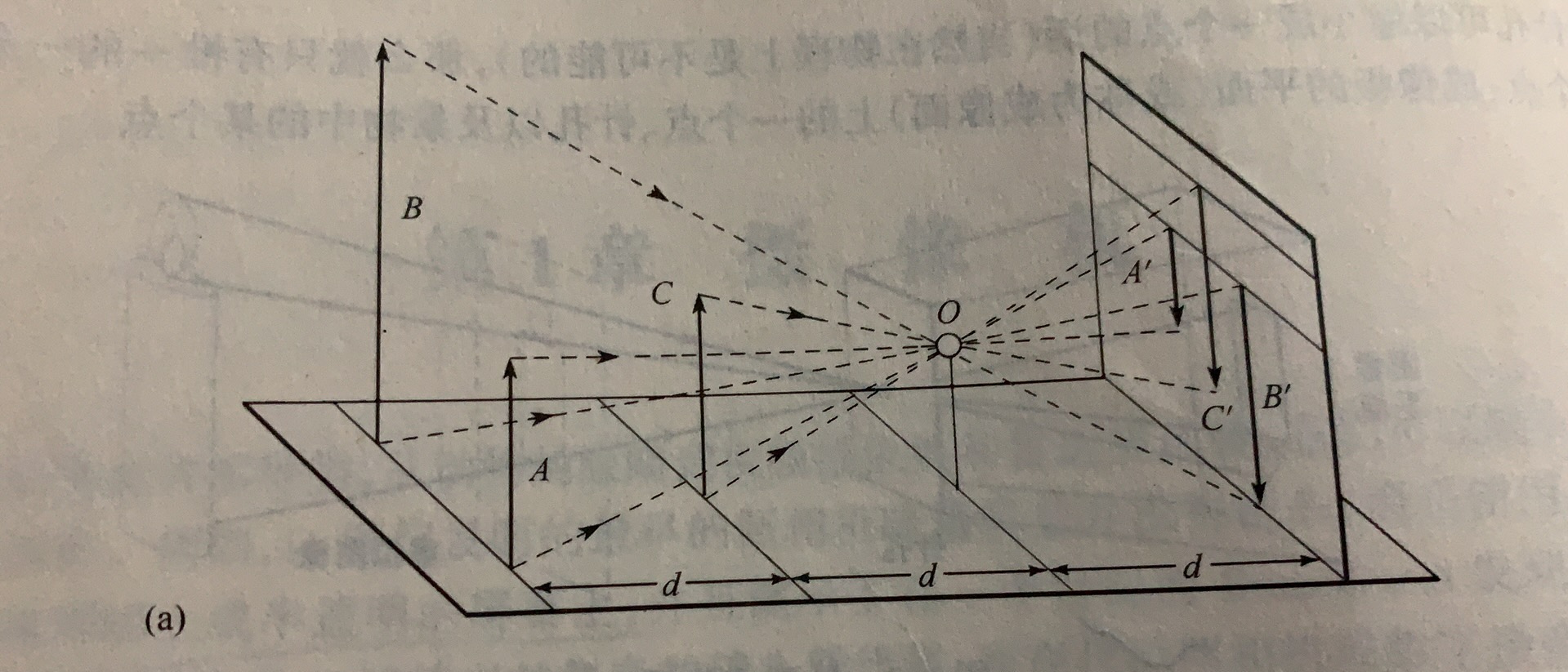
下图表明了透视投影的效果:所观察到的物体大小取决于它们的距离
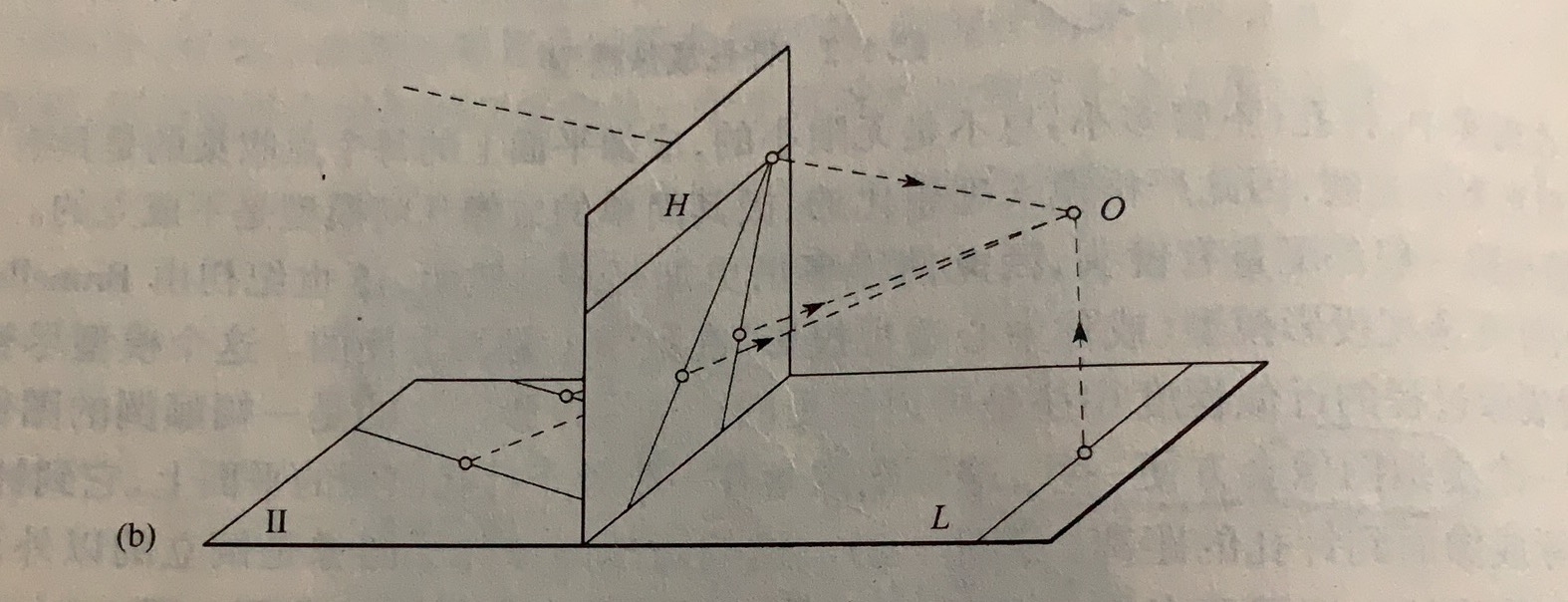
下图表明了:同一平面II上的两条平行线的投影在成像面上将会聚到(成像面上)一条水平线H上,H这条线是穿过针孔与II平行的平面与成像面相交的交线【同时,平面II上与成像面平行的线L在成像面上没有图像】
透视投影方程式
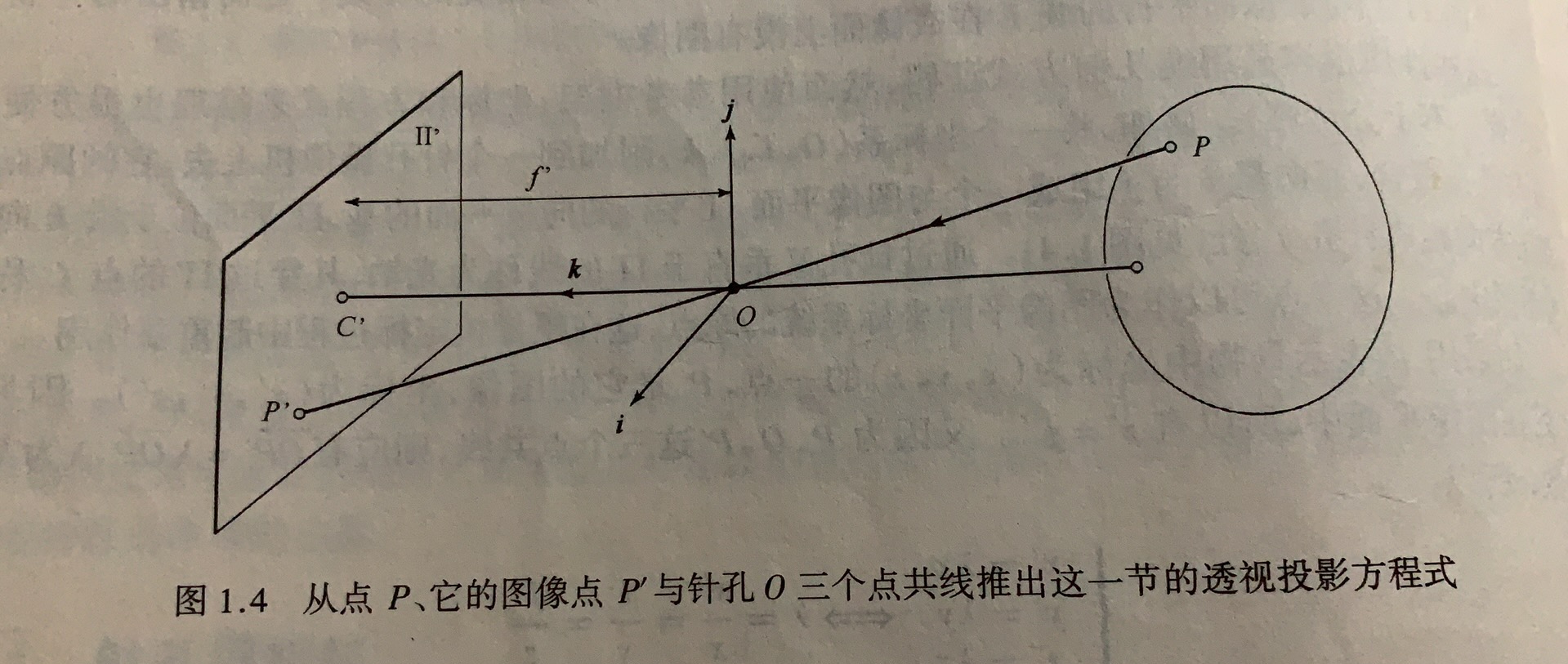
图中,点$P$表示景物中坐标为$(x,y,z)$的一点,$P’$是它的图像,坐标为$(x’,y’,z’)$。因为P’处在图像中,所以有$z’=f$,又因为$P$,$O$,$P’$三点共线,则有:
因此有
其中$x,y$是世界坐标,$x’, y’$是图像坐标,$f’$是针孔到视网膜的距离
仿射投影
以上面图a来说明,$z$必定为负值,因为平面位于针孔的前面。且m是个正值,称为放大率。当景物深度与它们到摄像机的平均距离相比很小时,m可以看作是一个常数,这种投影模型称为弱透视模型或按比例的正交。
弱透视投影:
其中$z_0$参考点深度($<0$),$m$放大倍数($>0$)
当$m=-1$时,这就是正交投影,可以想象一下,满足这种条件的时候,光都是平行的。
带镜头的摄像机
使用镜头的理由:保持图像锐化聚焦,同时又可以从大面积中收集光线
折射公式Snell规则
其中$n$是折射率,$\alpha$到法线的夹角
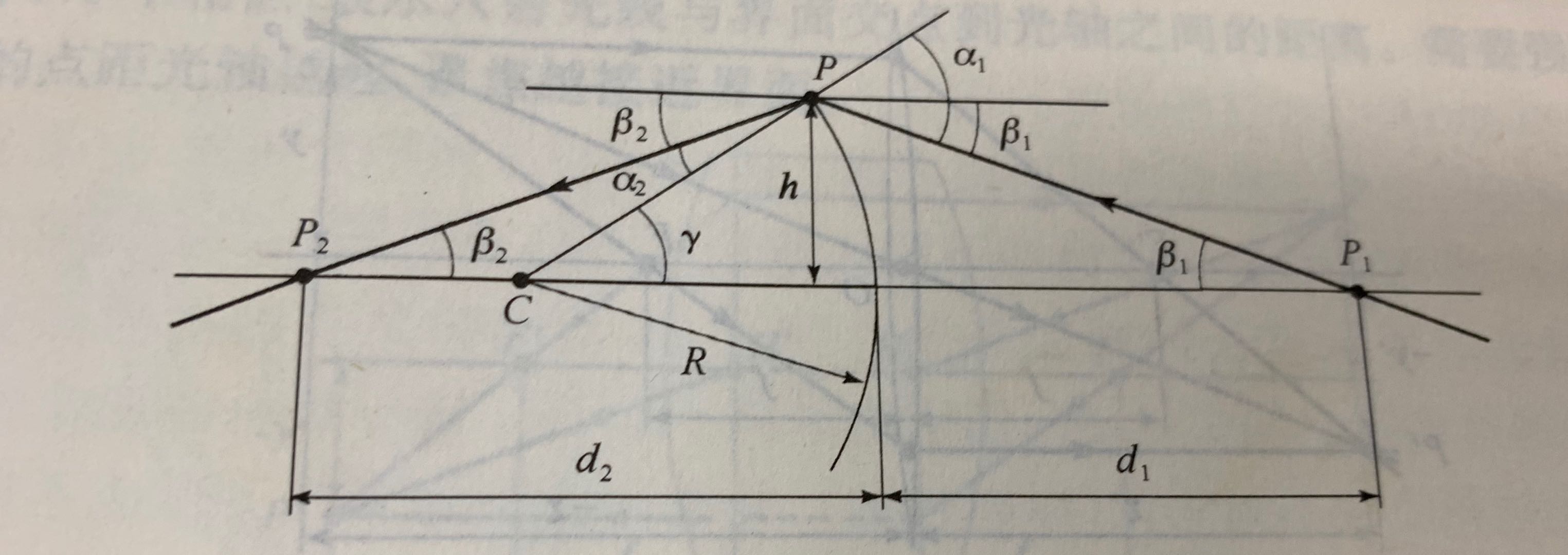
近轴折射方程式
推导成右式需要再增加角度的关系,以及由于角度较小用正切或正弦值代替,即$\alpha_1=\gamma+\beta_1\approx h(\frac1 R+\frac 1 {d_1})$和$\alpha_2=\gamma+\beta_2\approx h(\frac1 R-\frac 1 {d_2})$
薄透镜方程
其中,$z$物点深度($<0$),$z’$像点深度($>0$)$f$焦距
第二章 摄像机的几何模型
欧几里得解析几何基础
右手坐标系,$i,j,k$分别对应右手的手指,拇指向上,食指向前,中指向左
齐次坐标可以表示点、向量、平面;若要转换成普通坐标,只需要同除以最后一项即可
原点不同,移动$\sideset{^B}{}P = \sideset{^A}{}P+\sideset{^B}{}O_A$;基向量不同,旋转$\sideset{^B}{}P = \sideset{^B_A}{^A}RP$;一般的刚体变换,$\sideset{^B}{}P = \sideset{^B_A}{^A}RP+\sideset{^B}{_A}O$,写成矩阵的形式$\left(\begin{matrix}\sideset{^B}{}P\\1\end{matrix}\right)=\sideset{^B_A}{}{\cal{T}}\left(\begin{matrix}\sideset{^A}{}P\\1\end{matrix}\right)$,其中,$\sideset{^B_A}{}{\cal{T}}=^\text{def}\left(\begin{matrix}\ \sideset{^B_A}{^A}RP& \ \sideset{^B}{_A}O\\0^T& 1\end{matrix}\right)$
若R是一个非奇异3x3矩阵,则称$\cal{T}$表示一个仿射变换,新的坐标轴不一定能保证坐标轴长度为1且正交;若$\cal{T}$是非奇异4x4矩阵,则称其为投影变换
在坐标变换中,下标表示被表示的对象,而上标指示用来表示对象的坐标系
旋转矩阵的特点:
- 旋转矩阵的逆矩阵和它的转置相同
- 旋转矩阵的模是1
- 一个旋转的各列构成了右手正交坐标系
- 两个旋转矩阵的乘积仍然是旋转矩阵
- 旋转矩阵的乘法满足结合律
摄像机参数和透视投影
内参数
用$a^T_i(i=1,2,3)$表示由$\cal{A}$的最左边3列构成的矩阵$\cal{M}$的各行
$\cal{K}$内参数矩阵,透视投影矩阵$\cal{M}=\cal{K}(R\ t)$
$\cal{M}$是透视投影矩阵的充要条件是$Det(A)\not=0$
$\cal{M}$是无偏歪透视投影矩阵的充要条件是$Det(A)\not=0$且$(a_1\times a_3)\cdot (a_2\times a_3)=0$
$\cal{M}$是无偏歪单位长宽比透视投影矩阵的充要条件是$Det(A)\not=0$且$\begin{cases}(a_1\times a_3)\cdot (a_2\times a_3)=0\(a_1\times a_3)\cdot(a_1\times a_3)=(a_2\times a_3)\cdot(a_2\times a_3)\end{cases}$
外参数
光心是唯一一个图像不唯一确定的点,满足$\cal{M}\bf{0}=0$
投影矩阵可以由5个内参数和6个外参数(三个表示R,三个表示t)显式表达
仿射摄像机
当场景的深度大小变化远小于场景距摄像机的距离时,可以用仿射投影近似成像过程。
近不下来看下次补
仿射投影方程 $p=\cal{M}\left(\begin{matrix}P\\1\end{matrix}\right)=AP+b$
弱透视投影矩阵 $\cal{M}=(A \ b)=\frac 1 {z_r}\left(\begin{matrix}k&s\\0& 1\end{matrix}\right)\left(\begin{matrix}\cal{R}_2 &t_2\end{matrix}\right)$
类透视投影矩阵I $\cal{M}=\frac 1 {z_r}\left(\begin{matrix}k&s\\0& 1\end{matrix}\right)\left(\begin{matrix}\left(\begin{matrix}1&0&-x_r/z_r\\0&1&-y_r/z_r\end{matrix}\right)\cal{R} &t_2\end{matrix}\right)$
类透视投影矩阵II $\cal{M}=\frac 1 {z_r}\left(\begin{matrix}\left(\begin{matrix}k&s&u_0-u_r\\0&1&v_0-v_r\end{matrix}\right)\cal{R} &\left(\begin{matrix}k&s\\0& 1\end{matrix}\right)t_2\end{matrix}\right)$
三个几何问题
From 《计算机视觉 模型、学习、推理》
前景:$x=pinhole[w,K,R,T]$
$Pr(x|w,A,R,T)=Norm_x[pinhole[w,K,R,T],\sigma^2I]$
其中$\sigma^2$是噪声方差,加性噪声通常以球形协方差分布
学习外在参数
假设一个已知对象有I个不同的3D点$\{w_i\}^{I}_{i=1}$,他们在图像中的对应投影点为$\{x_i\}^I_{i=1}$,以及已知的内在参数$K$。目标是对旋转矩阵$R$和平移矢量$T$进行估计,这两者可以将目标坐标系中的点映射为摄像机坐标系中的点,使得
这是最大似然学习问题,我们的目标是要找到参数$R$和$T$使得模型的预测$pinhole[w_i,K,R,T]$与观测的2D点$x_i$一致
我们已知
易得
将上式带入矩阵,可得
由此我们可以构建方程组:
这样问题变为了求解最小方向问题(类似于椭圆中找到主轴)的标准形式$Ab=0$,我们要在满足$|b|=1$的条件下,寻找使$|Ab|^2$最小的b值,可以通过计算奇异值分解$A=ULV^T$并将$\hat b$设置为V的最后一列来得到解
学习内在参数
目标是对内在参数$K$进行估计,$K$将通过光心的光线方向与图像平面上的坐标相关联。这一估计过程称为校准。
形式化描述:给定一个已知3D对象,该对象有I个不同的3D点$\{w_i\}^{I}_{i=1}$以及在图像中的对应投影点$\{x_i\}^I_{i=1}$,对内在参数估计
$\hat{K}=argmax_{K}[max_{R,T}[\displaystyle\sum^I_{i=1}log[Pr(x_i|w_i,K,R,T)]]]$
这是最大似然学习问题,我们的目标是要找到参数$K, R$和$T$使得模型的预测$pinhole[w_i,K,R,T]$与观测的2D点$x_i$一致
推理3D世界点
给定$2\leq J$个校准摄像机以及场景中的点$w$在其中的投影$\{x_j\}^I_{J=1}$,我们希望对点$w$的3D位置进行估计
当$j=2$时,称为校准立体重构;当$J>2$时,这称为多视图重构
形式化描述:在已知位置有$J$个校准摄像机对同一个3D点$w$进行观测,且已知对应的2D投影$\{x_j\}^I_{J=1}$,则在$J$幅图像中可以建立现实世界中点的3D位置$w$
第三章 摄像机的几何标定
摄像机标定可以看做是一个优化问题,优化的目标是使摄像机观察到的特征与理论位置之间的距离最小
径向畸变
由于目标点偏离光轴而引起的畸变;改变了图像点p到图像中心的距离,但是没有改变图像点相对于中心直线方向;当$8\leq n$时,可以用齐次线性最小二乘法计算单位向量m的值
$\cal{Q}=^\text{def}\left(\begin{matrix}v_1P_1^T&-u_1P_1^T\\\cdot\cdot\cdot&\cdot\cdot\cdot&\cdot\cdot\cdot\\v_nP_n^T&-u_nP_n^T\end{matrix}\right),n=^\text{def}\left(\begin{matrix}m_1\\m_2\end{matrix}\right)$
估计内外参数:
$\frac \beta \alpha=\frac {|a_2|}{|a_1|},cos\theta=-\frac{a_1\cdot a_2}{|a_2||a_1|}$
$\alpha=\epsilon p|a_1|sin\theta, \beta=\epsilon p|a_2|sin\theta, \epsilon=\pm1$
$\begin{cases}r_1=\frac \epsilon{sin\theta}(\frac 1 {|a_1|}+\frac {cos\theta}{|a_2|})\\r_2=\frac \epsilon{a_2}a_2\\r_3=r_1r_2\end{cases}$
$\left(\begin{matrix}\alpha_x-\alpha cot\theta t_y\\\frac \beta {sin\theta}t\end{matrix}\right)=p\left(\begin{matrix}b_1\\b_2\end{matrix}\right)$
最小二乘法的参数估计
最小二乘法的意思就是使均方误差最小化
线性最小二乘法
假设有p个关于q个未知数的线性方程组,则
当$p<q$时,方程的解集构成一个(q-p)维的$\R^q$上的子空间
当$p=q$时,有唯一的解
当$p>q$时,方程无解
当方程组的右侧均为0的时候,则是齐次系统了
非线性最小二乘法
当$p<q$时,解构成一个$\R^q$上的(q-p)维的子集
当$p=q$时,有有限个解
当$p>q$时,无解
牛顿法、高斯牛顿法(需要复习数值分析部分!!!还没看)
线性方法进行标定
步骤:
计算这个坐标系下摄像机的投影矩阵$\cal{M}$
n个点的约束可以写成2n维的线性方程$\cal{M},Pm=0$,方程参数为投影矩阵的分量
当$6\leq n$时,可以用齐次线性最小二乘法计算单位向量m的值
从投影矩阵估计摄像机的内外参数(投影矩阵有11个变量,因此根据上述所需的线性约束应该小于等于11)
其中$\rho$是比例系数,使投影矩阵的模为1;若加上旋转矩阵各行都是单位长度且相互垂直的约束,又可以得到
由于$\theta$取值在$\pi/2$的领域之间,其正弦值总是正的,则有
于是
Zhang’s Method
首先,所有点是在一个平面上,因此在世界坐标系中我们可以认为$z_w=0$(采用平面标定模板),从而外参矩阵的第三列对结果无影响。我们可以将外参矩阵第三列和$z_w$同时删去,简化为
令
则
又由于$\left(\begin{matrix}r_1,r_2,r_3\end{matrix}\right)$三者正交,因此有
由上两个等式可得
设$B=K^{-T}K^{-1}$,易知$B$是对称正矩阵,我们将重复元素去除,定义$b=(b_{11},b_{12},b_{13},b_{22},b_{23},b_{33})$
综合可知
Find a solution that minimizes the least-squares error
其中,V是一个2n×6的矩阵,b是一个6维向量,所以
- 当n≥3,可以得到b的唯一解
- 当n=2,则可以假设扭曲参数γ=0作为额外的约束条件
- 当n=1,则值能计算两个相机的内参数
对于方程$Vb=0$可以使用SVD求其最小二乘解。对$V^TV$进行SVD分解,其最小特征值对应的特征向量就是$Vb=0$的最小二乘解,从而求得矩阵B。由于这里得到的B的估计值是在相差一个常量因子下得到的,所以有:
从而可以得到相机的各个内参数:
为了进一步增加标定结果的可靠性,可以使用最大似然估计(Maximum likelihood estimation)来优化上面估计得到的结果。
对于畸变部分,张的方法如下:
在张氏标定法中只关注了影响较大的径向畸变。
$(u,v)$是理想的无畸变的像素坐标
$(\hat u, \hat v)$是畸变后的像素坐标
$(u_0,v_0)$是相机的主点
$(x,y)$是理想的无畸变的归一化的图像坐标
$(\hat x,\hat y)$是畸变后的归一化的图像坐标
$k_1,k_2$表示径向畸变的系数
由此我们可以写出径向畸变公式:
径向畸变的中心和相机的主心是在相同的位置,即
假设$\gamma y=0$,则由上两式可得
现有n幅图像,每幅图像可用点m个,则我们共可以得到2mn个等式,记$Dk=d$作为矩阵形式
则
然后便是利用最大似然估计取得最优解,即使得下述式子最小
从而解得$k_1,k_2$后,将图像先去畸变,然后再通过上述的方法用图像坐标来估计相机内参数
转载请注明出处,谢谢。
愿 我是你的小太阳
